






विभिन्न उपयोगों के लिए चीन वाल्व पार्ट्स के लिए अच्छी उपयोगकर्ता प्रतिष्ठा

हमारी कंपनी विभिन्न उपयोगों के लिए चीन वाल्व पार्ट्स के लिए अच्छी उपयोगकर्ता प्रतिष्ठा के लिए "गुणवत्ता निश्चित रूप से व्यवसाय का जीवन है, और स्थिति इसकी आत्मा हो सकती है" के मूल सिद्धांत पर कायम है, हम निश्चित रूप से हमारी विनिर्माण इकाई की जांच करने के लिए आपका स्वागत करते हैं और निकट भविष्य में अपने घर और विदेश में उपभोक्ताओं के साथ स्वागत योग्य व्यावसायिक संबंध बनाने के लिए तत्पर रहें।
हमारी कंपनी "गुणवत्ता निश्चित रूप से व्यवसाय का जीवन है, और स्थिति इसकी आत्मा हो सकती है" के मूल सिद्धांत पर कायम है।कास्टिंग वाल्व बॉडी, चीन वाल्व, अब हमारे पास इस उद्योग में 8 वर्षों से अधिक का अनुभव है और इस क्षेत्र में हमारी अच्छी प्रतिष्ठा है। हमारे उत्पादों को दुनिया भर में ग्राहकों से प्रशंसा मिली है। हमारा उद्देश्य ग्राहकों को उनके लक्ष्य हासिल करने में मदद करना है। हम इस जीत-जीत की स्थिति को हासिल करने के लिए बहुत प्रयास कर रहे हैं और हमारे साथ जुड़ने के लिए आपका हार्दिक स्वागत करते हैं।
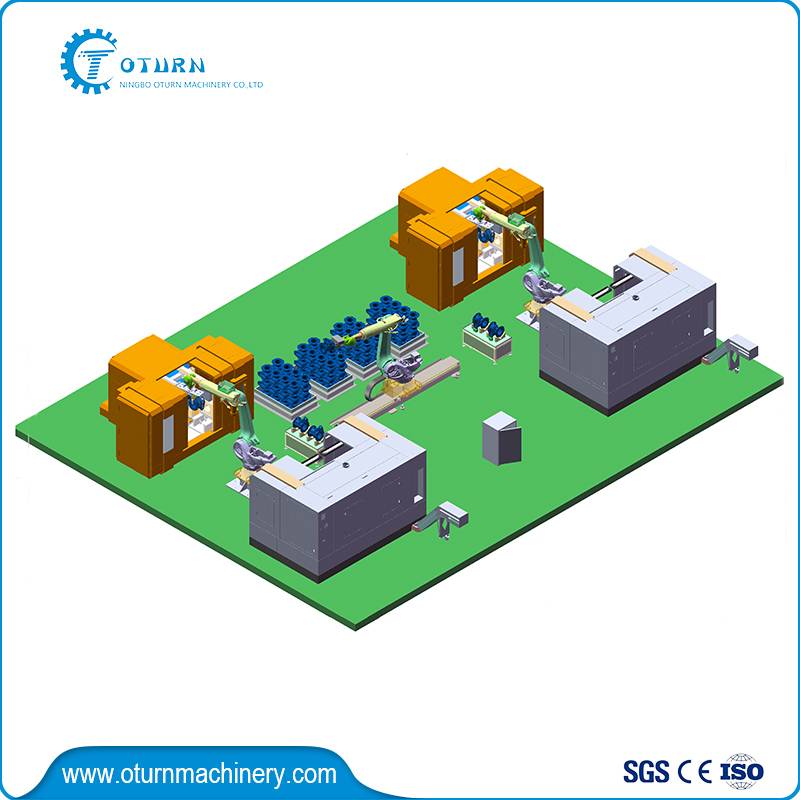
1. ऑपरेटर वाल्व बॉडी वर्कपीस से भरे पैलेट को लोडिंग पोजिशनिंग स्लॉट 1 और पोजिशनिंग के लिए लोडिंग पोजिशनिंग स्लॉट 2 में रखता है, और खाली ट्रे को पोजिशनिंग के लिए लोडिंग पोजिशनिंग स्लॉट 1 और अनलोडिंग पोजिशनिंग स्लॉट 2 में रखता है।
2. रोबोट 1 पर कैमरा वर्कपीस को सटीक स्थिति में लाने के लिए फीडिंग पोजिशनिंग स्लॉट 1 में पैलेट पर वर्कपीस को स्कैन करता है, और वर्कपीस 1 को क्लैंप करके बफर टेबल 1 पर पोजिशनिंग फिक्स्चर में रखा जाता है।
साथ ही, यह संसाधित वर्कपीस 3 को पकड़ता है (रोबोट 2 ने इसे मशीन टूल 2 से पकड़ लिया है), अनलोडिंग पोजिशनिंग स्लॉट 1 पर ले जाता है और आवश्यकतानुसार इसे फूस में बड़े करीने से रखता है।
रोबोट 1 पर कैमरा वर्कपीस को सटीक स्थिति में लाने के लिए फीडिंग पोजिशनिंग स्लॉट 2 में पैलेट पर वर्कपीस को स्कैन करता है, और वर्कपीस 4 को क्लैंप करके बफर टेबल 2 पर पोजिशनिंग फिक्स्चर में रखा जाता है।
साथ ही, यह संसाधित वर्कपीस 6 को पकड़ता है (रोबोट 3 ने इसे मशीन टूल 4 से पकड़ लिया है), अनलोडिंग पोजिशनिंग स्लॉट 2 में ले जाता है और आवश्यकतानुसार इसे फूस में बड़े करीने से रखता है।
3. रोबोट 2 बफर टेबल 1 से वर्कपीस 1 को पकड़ता है और मशीन टूल 1 तक चलता है, तैयार वर्कपीस 2 को पकड़ता है और वर्कपीस 1 को क्लैंप करता है, मशीन टूल 2 तक चलता है, तैयार वर्कपीस 3 को पकड़ता है और वर्कपीस 2 को क्लैंप करता है , और बफ़र टेबल पर चलता है 1. वर्कपीस रखें 3. रोबोट 2 चक्र पूरा करता है।
4.रोबोट 3 बफ़रिंग टेबल 2 से वर्कपीस 4 को पकड़ता है और मशीन टूल 3 तक चलता है, तैयार वर्कपीस 5 को पकड़ता है और वर्कपीस 4 को क्लैंप करता है, मशीन टूल 4 तक चलता है, तैयार वर्कपीस 6 को पकड़ता है और वर्कपीस 5 को क्लैंप करता है। , और बफ़र टेबल पर चलता है 2. वर्कपीस रखें 6. रोबोट 3 चक्र पूरा करता है।




हमारी कंपनी विभिन्न उपयोगों के लिए चीन वाल्व पार्ट्स के लिए अच्छी उपयोगकर्ता प्रतिष्ठा के लिए "गुणवत्ता निश्चित रूप से व्यवसाय का जीवन है, और स्थिति इसकी आत्मा हो सकती है" के मूल सिद्धांत पर कायम है, हम निश्चित रूप से हमारी विनिर्माण इकाई की जांच करने के लिए आपका स्वागत करते हैं और निकट भविष्य में अपने घर और विदेश में उपभोक्ताओं के साथ स्वागत योग्य व्यावसायिक संबंध बनाने के लिए तत्पर रहें।
चीन वाल्व, कास्टिंग वाल्व बॉडी के लिए अच्छी उपयोगकर्ता प्रतिष्ठा, अब हमारे पास इस उद्योग में 8 वर्षों से अधिक का अनुभव है और इस क्षेत्र में अच्छी प्रतिष्ठा है। हमारे उत्पादों को दुनिया भर में ग्राहकों से प्रशंसा मिली है। हमारा उद्देश्य ग्राहकों को उनके लक्ष्य हासिल करने में मदद करना है। हम इस जीत-जीत की स्थिति को हासिल करने के लिए बहुत प्रयास कर रहे हैं और हमारे साथ जुड़ने के लिए आपका हार्दिक स्वागत करते हैं।
अपना संदेश हमें भेजें:
उत्पाद श्रेणियाँ
-

चीन हाई स्पीड हॉट एस के लिए व्यावसायिक फैक्टरी...
-

फैक्टरी सस्ते चीन में निर्मित OEM अनुकूलित सीएनसी...
-

आपूर्ति OEM/ODM चीन अनुकूलित सीएनसी मशीनिंग पी...
-

सबसे अधिक बिकने वाला चीन सस्ता और किफायती सीएनसी खराद...
-

फैक्टरी मुक्त नमूना चीन सर्वोत्तम मूल्य टच स्क्रीन...
-
शीर्ष ग्रेड चीन स्टॉक 3/4/5 एक्सिस वर्टिकल सीएनसी मशीन...