BOSM -4Z2000 हाई स्पीड सीएनसी ड्रिलिंग और मिलिंग मशीन
1.उपकरण का उपयोग:
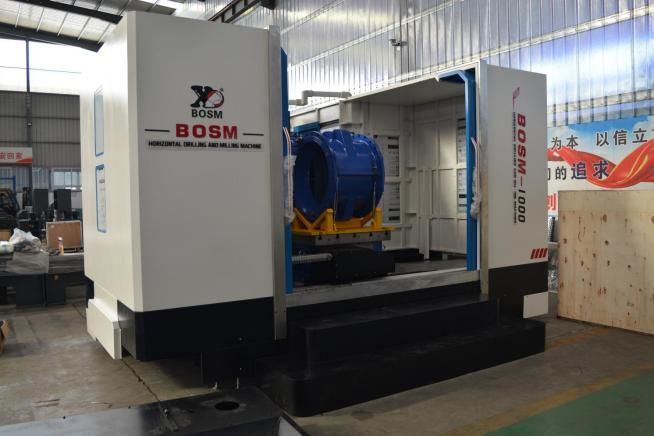
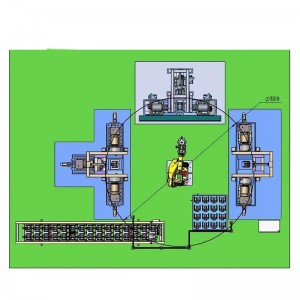
BOSM-1000 क्षैतिज सीएनसी ड्रिलिंग और मिलिंग मशीन का उपयोग मुख्य रूप से मोटाई की प्रभावी सीमा के भीतर वाल्व, वाल्व ब्लॉक, रेड्यूसर, फ्लैंज, डिस्क, रिंग, स्लीविंग सपोर्ट और अन्य वर्कपीस की बहुआयामी कुशल ड्रिलिंग, मिलिंग, टैपिंग और बोरिंग प्रसंस्करण के लिए किया जाता है। . ड्रिलिंग, मिलिंग, टैपिंग और बोरिंग को एकल सामग्री भागों और मिश्रित सामग्रियों पर महसूस किया जा सकता है। मशीन की मशीनिंग प्रक्रिया डिजिटल रूप से नियंत्रित होती है, और संचालन बहुत सुविधाजनक है। यह स्वचालन, उच्च परिशुद्धता, बहु-विविधता और बड़े पैमाने पर उत्पादन का एहसास कर सकता है।
2. उपकरण संरचना:
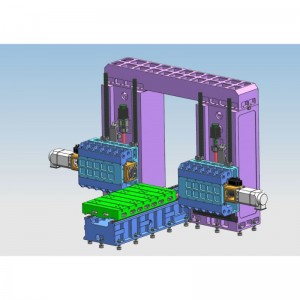
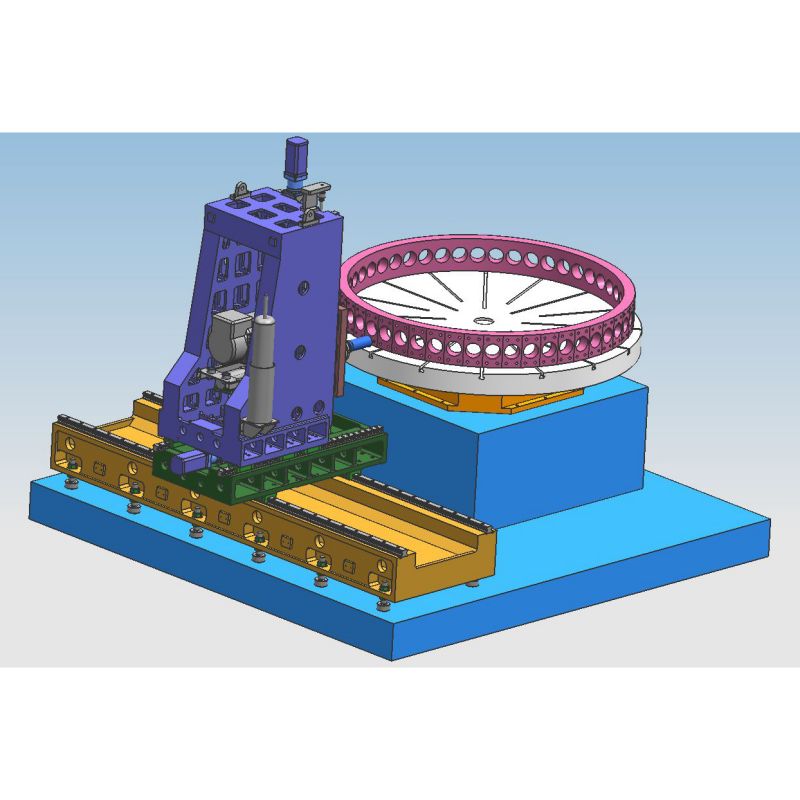
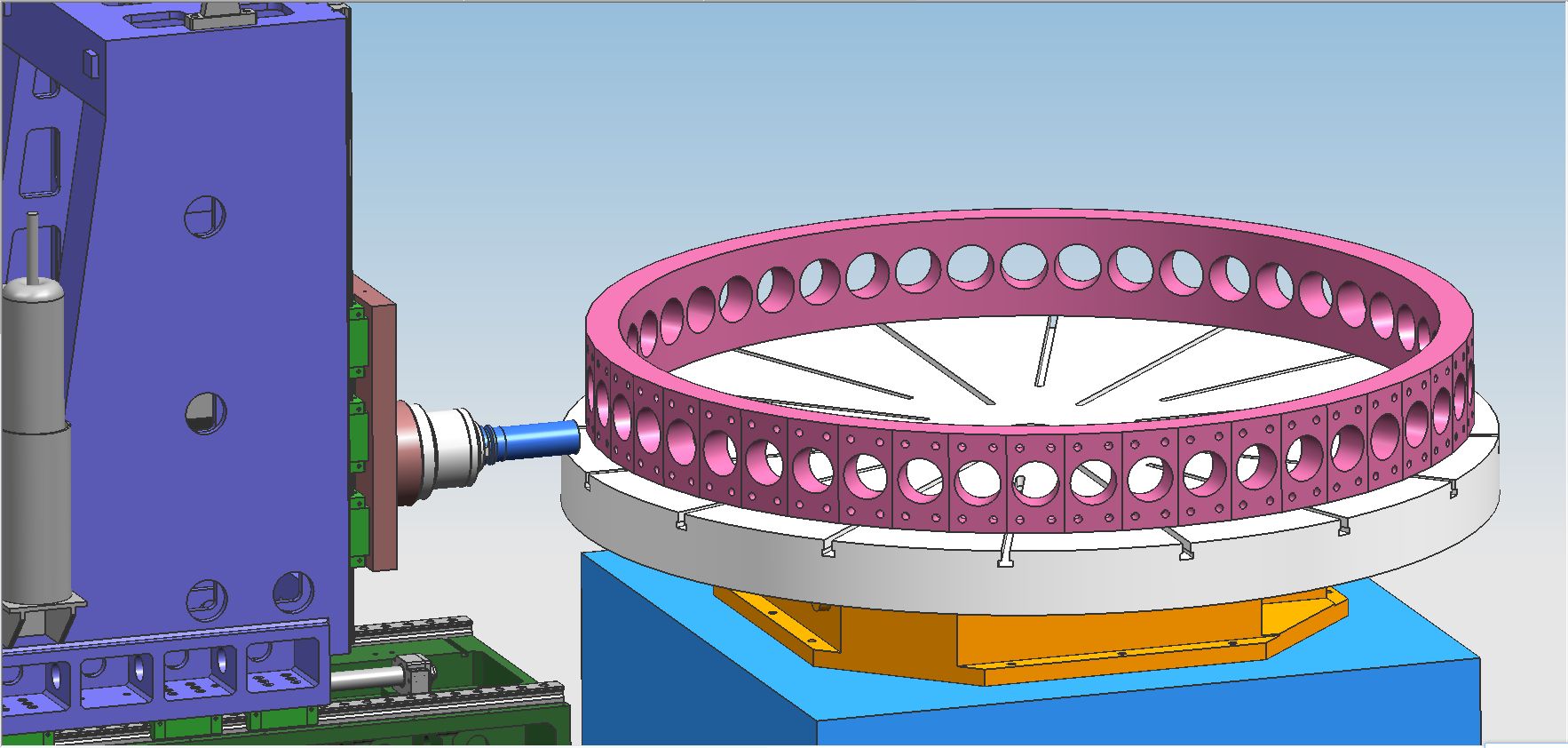
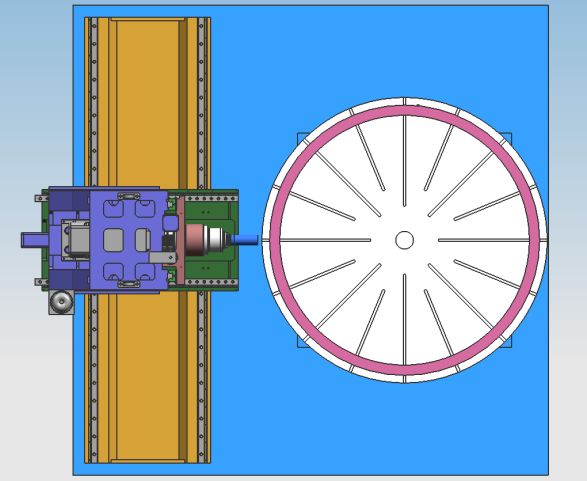
यह उपकरण मुख्य रूप से बिस्तर, सीएनसी इंडेक्सिंग रोटरी टेबल, मूवेबल कॉलम, मूवेबल सैडल, ड्रिलिंग और मिलिंग पावर हेड, स्वचालित स्नेहन डिवाइस और सुरक्षा उपकरण, सर्कुलेटिंग कूलिंग डिवाइस, डिजिटल कंट्रोल सिस्टम, हाइड्रोलिक सिस्टम, इलेक्ट्रिकल सिस्टम इत्यादि से बना है। रोलिंग रैखिक गाइड रेल समर्थित और निर्देशित है, और सटीक पेंच संचालित है। मशीन में उच्च स्थिति निर्धारण सटीकता और दोहराव स्थिति सटीकता है।
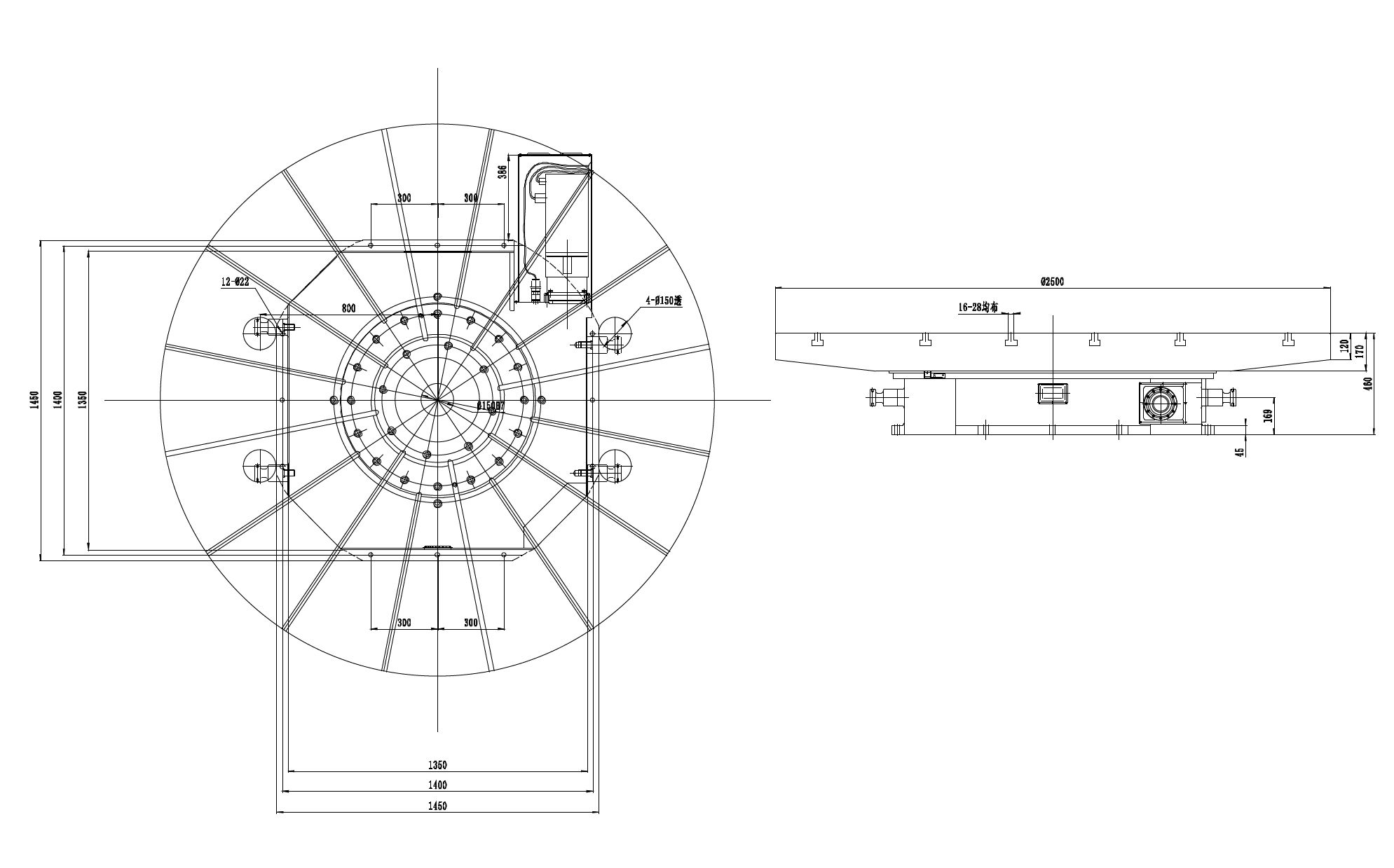
2.1. बेड वर्कटेबल: बेड HT250 कच्चा लोहा संरचनात्मक भागों से बना है। आंतरिक तनाव को दूर करने के लिए इसे द्वितीयक तड़के के बाद समाप्त किया जाता है। इसमें अच्छी गतिशील और स्थैतिक कठोरता है और कोई विरूपण नहीं है। परिशुद्धता संख्यात्मक नियंत्रण अनुक्रमण प्लेट, सर्वो ड्राइव 360° मनमानी अनुक्रमण स्थिति और वायु/हाइड्रोलिक लॉकिंग, ड्राइव सिस्टम घूर्णन शाफ्ट भाग 360° को स्वचालित रूप से अनुक्रमित करने के लिए एसी सर्वो मोटर का उपयोग करता है, और अनुक्रमण सटीकता एक डिग्री का एक हजारवां हिस्सा है। इंडेक्सिंग प्लेट को बिस्तर के शीर्ष पर रखा गया है, और समायोज्य बोल्ट बिस्तर के नीचे वितरित किए गए हैं, जो बिस्तर के कार्यबल के स्तर को आसानी से समायोजित कर सकते हैं।
2.2. चल स्तंभ: आंतरिक तनाव को दूर करने के लिए चल कच्चा लोहा संरचना स्तंभ द्वितीयक टेम्परिंग उपचार के बाद समाप्त हो जाता है। इसमें अच्छी गतिशील और स्थैतिक कठोरता है और कोई विरूपण नहीं है। सटीक बॉल स्क्रू जोड़ी का एक सेट और एक सर्वो मोटर कॉलम स्लाइड को वाई-अक्ष दिशा में ले जाता है। सटीक बॉल स्क्रू जोड़ी का एक सेट और एक सर्वो मोटर कॉलम स्लाइड को एक्स-अक्ष दिशा में ले जाता है। यूनिट स्लाइड पर एक ड्रिलिंग यूनिट स्थापित करें। युग्मन के माध्यम से सर्वो मोटर द्वारा संचालित बॉल स्क्रू पर बॉल नट के घूमने से स्तंभ की गति का एहसास होता है।
2.3. मोबाइल सैडल: मोबाइल सैडल दो अल्ट्रा-उच्च असर क्षमता वाले रोलिंग रैखिक गाइड रेल जोड़े, सटीक बॉल स्क्रू जोड़ी का एक सेट और एक सर्वो मोटर से सुसज्जित है, जो ड्रिलिंग पावर हेड को जेड-अक्ष दिशा में स्थानांतरित करने के लिए ड्राइव करता है, जो कर सकता है पावर हेड को तेजी से आगे बढ़ाना, आगे काम करना, तेजी से रिवर्स करना, रुकना और अन्य क्रियाओं का एहसास करें। इसमें स्वचालित चिप तोड़ने, चिप हटाने और रोकने के कार्य हैं।
2.4. ड्रिलिंग पावर हेड: ड्रिलिंग पावर हेड ताइवान मैकेनिकल स्पिंडल को अपनाता है, और विशेष परिशुद्धता स्पिंडल कोणीय संपर्क असर को अपनाता है, जो उच्च शक्ति सिंक्रोनस बेल्ट ट्रांसमिशन के माध्यम से चरणहीन गति परिवर्तन का एहसास करता है। सर्वो मोटर्स और बॉल स्क्रू द्वारा संचालित। Y-अक्ष को जोड़ा जा सकता है, अर्ध-बंद-लूप नियंत्रण को अपनाया जा सकता है, और रैखिक और गोलाकार प्रक्षेप कार्यों का एहसास हो सकता है। स्पिंडल सिरा एक BT50 टेपर होल है।
2.5. स्वचालित स्नेहन उपकरण और सुरक्षा उपकरण:
यह मशीन एक स्वचालित स्नेहन उपकरण से सुसज्जित है, जो स्वचालित रूप से चलती जोड़ियों जैसे गाइड रेल, लीड स्क्रू और रैक को चिकनाई कर सकती है। मशीन
Z-अक्ष और Y-अक्ष धूल-रोधी सुरक्षात्मक कवर से सुसज्जित हैं, और कार्य तालिका के चारों ओर वॉटरप्रूफ स्पलैश बैफल्स स्थापित किए गए हैं।
2.6. पूर्ण डिजिटल संख्यात्मक नियंत्रण प्रणाली:
2.6.1. चिप ब्रेकिंग फ़ंक्शन के साथ, चिप ब्रेकिंग समय और चिप ब्रेकिंग चक्र को मैन-मशीन इंटरफ़ेस पर सेट किया जा सकता है।
2.6.2. टूल लिफ्टिंग फ़ंक्शन से सुसज्जित, टूल लिफ्टिंग ऊंचाई को मैन-मशीन इंटरफ़ेस पर सेट किया जा सकता है। जब ड्रिलिंग इस ऊंचाई तक पहुंचती है, तो ड्रिल बिट को तुरंत वर्कपीस के शीर्ष पर उठा लिया जाता है, फिर चिप्स को फेंक दिया जाता है, और फिर तेजी से ड्रिलिंग सतह पर आगे बढ़ाया जाता है और स्वचालित रूप से काम करने के लिए परिवर्तित किया जाता है।
2.6.3. सेंट्रलाइज्ड ऑपरेशन कंट्रोल बॉक्स और हैंड-हेल्ड यूनिट संख्यात्मक नियंत्रण प्रणाली को अपनाते हैं और यूएसबी इंटरफेस और एलसीडी लिक्विड क्रिस्टल डिस्प्ले स्क्रीन से लैस हैं। प्रोग्रामिंग, स्टोरेज, डिस्प्ले और संचार की सुविधा के लिए, ऑपरेशन इंटरफ़ेस में मैन-मशीन संवाद, त्रुटि क्षतिपूर्ति और स्वचालित अलार्म जैसे कार्य हैं।
2.6.4. उपकरण में प्रसंस्करण से पहले छेद की स्थिति का पूर्वावलोकन और पुन: निरीक्षण करने का कार्य है, और ऑपरेशन बहुत सुविधाजनक है
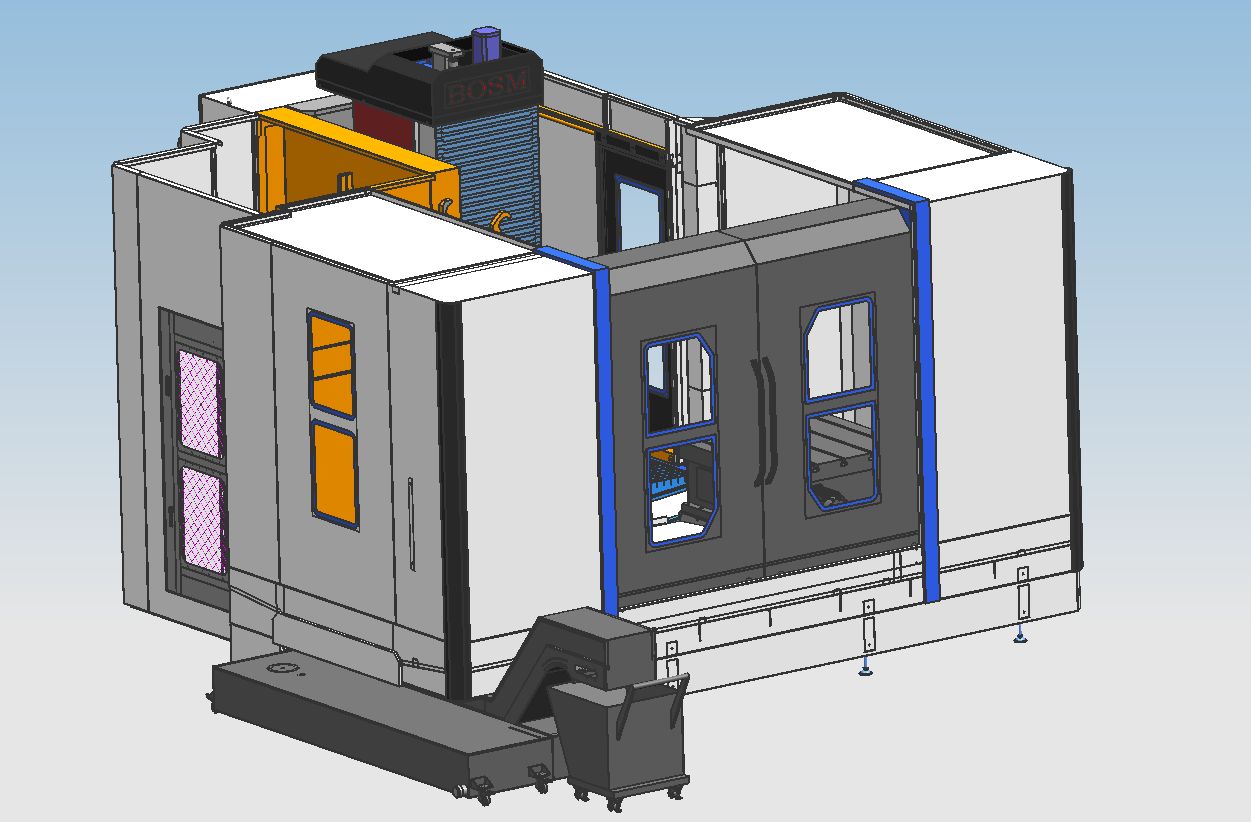
* बड़े छल्ले फहराने और खिलाने की सुविधा सुनिश्चित करने के लिए, मशीन में कोई बाहरी सुरक्षा नहीं है, और बाहरी सुरक्षा वैकल्पिक है।
3. मशीनपर्यावरण का उपयोग करें:
बिजली की आपूर्ति: तीन-चरण AC380V±10%, 50Hz±1 परिवेश का तापमान: 0°~ 45°
4.तकनीकी मापदंड
| नमूना | बीओएसएम-1000 | |
| अधिकतम प्रसंस्करण वर्कपीस का आकार | वर्कपीस का स्वीकार्य अधिकतम रोटेशन व्यास (मिमी) | ≤Φ2000 |
|
काम की मेज | वर्कटेबल का आयाम (मिमी) वर्ग | □1000 |
| वर्कटेबल के आयाम (मिमी) गोल | Φ1200 | |
| क्षैतिज अधिकतम भार (किग्रा) | 5000 | |
|
वर्टिकल रैम ड्रिलिंग यूनिट | मात्रा) | 1 |
| धुरी शंकु | BT50 | |
| ड्रिलिंग व्यास (मिमी) | 2-120 | |
| मिलिंग कटर डिस्क व्यास (मिमी) | 200 | |
| टैपिंग व्यास (मिमी) | एम6-एम36 | |
| स्पिंडल सिरे से टेबल केंद्र तक की दूरी (मिमी) | 1000-1600 | |
| स्पिंडल केंद्र से टेबल के ऊपरी तल तक की दूरी (मिमी) | 100-1100 | |
| स्पिंडल गति (आर/मिनट) | 30-3000 | |
| स्पिंडल मोटर पावर (किलोवाट) | 30 | |
| workpiece घूर्णन अक्ष (एक अक्ष) | अधिकतम विभाजन संख्या (मिमी) | 360° |
| न्यूनतम विभाजन इकाई निर्धारित करें | 0.001° | |
| ए-अक्ष सर्वो मोटर पावर (किलोवाट) | 4.2 | |
| पावर हेड बाएँ और दाएँ चलता है (X अक्ष) | अधिकतम स्ट्रोक (मिमी) | 2000 |
| एक्स-अक्ष गतिमान गति (एम/मिनट) | 0~8 | |
| एक्स-अक्ष सर्वो मोटर पावर (किलोवाट) | 2.4 | |
| पावर हेड ऊपर और नीचे चलता है (Y अक्ष) | अधिकतम स्ट्रोक (मिमी) | 1000 |
| Y-अक्ष गतिमान गति (एम/मिनट) | 0~8 | |
| Y-अक्ष सर्वो मोटर पावर (किलोवाट) | 2.4 ब्रेक | |
| स्तंभ अनुदैर्ध्य आंदोलन (जेड अक्ष) | अधिकतम स्ट्रोक (मिमी) | 600 |
| Z-अक्ष गतिमान गति (एम/मिनट) | 0~4 | |
| Z अक्ष सर्वो मोटर पावर (किलोवाट) | 2.4 | |
| स्थिति निर्धारण सटीकता | 1000 मिमी | ±0.05 |
| repeatability | 1000 मिमी | ±0.025 |
| सीएनसी अनुक्रमण तालिका अनुक्रमण सटीकता (मिमी) |
| 15” |
| मशीन के आयाम (सुरक्षा सहित) | लंबाई (एक्स) × चौड़ाई (जेड) × ऊंचाई (वाई) (मिमी) | कुल 5300*6000*3400 |
| संरक्षण सहित सकल वजन (टी)। | (लगभग)20 | |