






बीओएसएम-क्षैतिज काउंटर ड्रिलिंग और बोरिंग मशीन
1. उपकरण का उपयोग:
बीओएसएम क्षैतिज काउंटर ड्रिलिंग और बोरिंग मशीन आपकी कंपनी के लिए टावर क्रेन कैप्स को संसाधित करने के लिए एक विशेष मशीन है। मशीन क्षैतिज ड्रिलिंग और बोरिंग पावर हेड के 2 सेटों से सुसज्जित है, जो प्रभावी स्ट्रोक रेंज के भीतर वर्कपीस की ड्रिलिंग, मिलिंग और बोरिंग का एहसास कर सकती है। काटने और अन्य प्रसंस्करण, उपकरण की स्थिति की गति तेज है, प्रसंस्करण सटीकता अधिक है, और प्रसंस्करण दक्षता अधिक है।
2. उपकरण संरचना विशेषताएँ:
2. 1. के मुख्य घटकमशीन
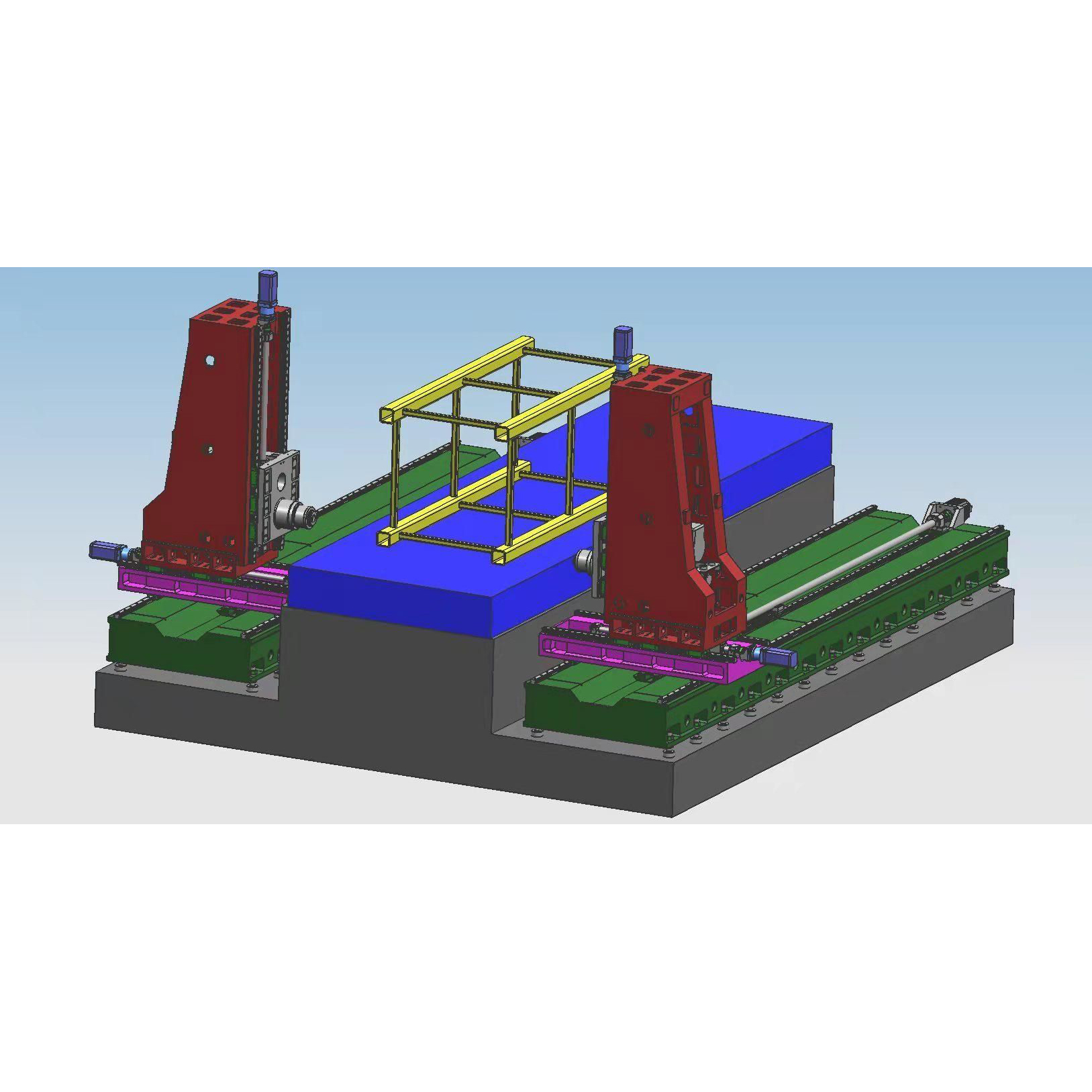
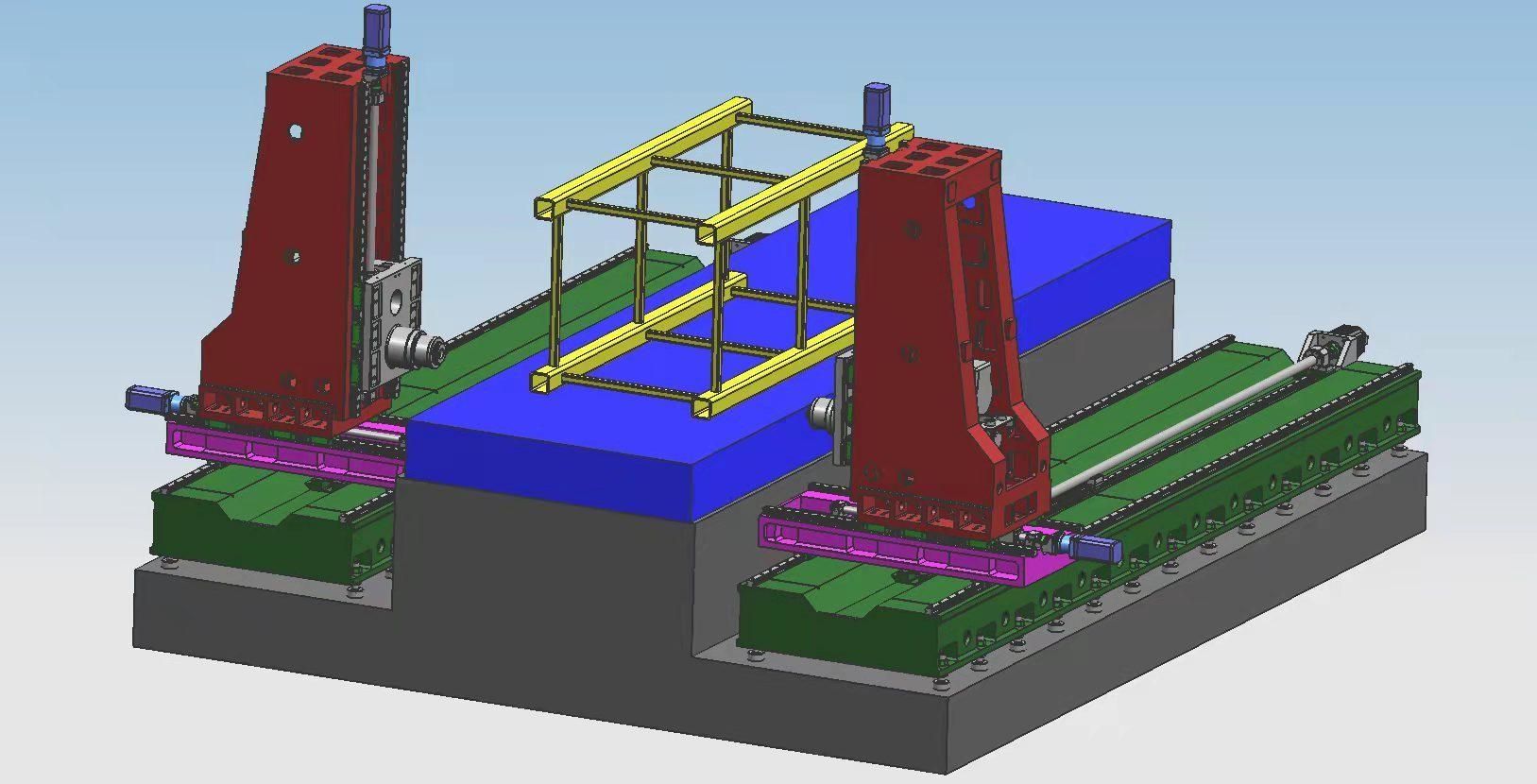
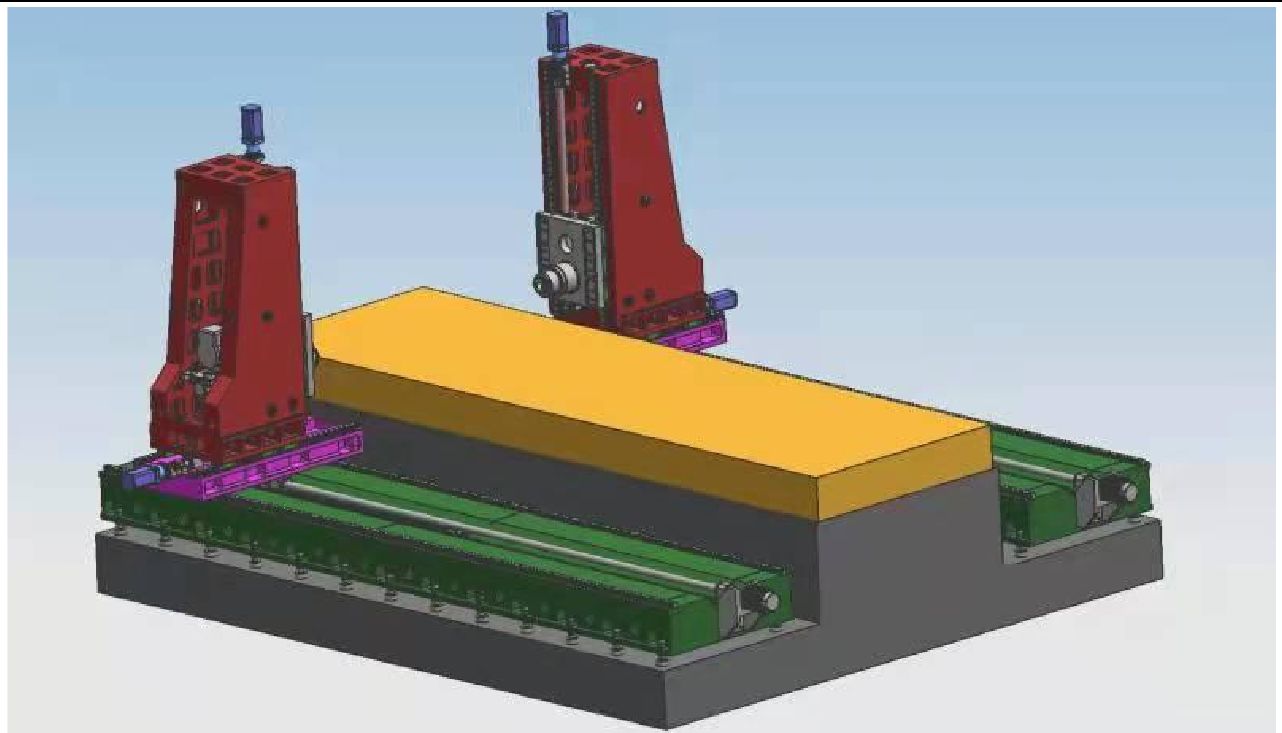
मशीन के मुख्य घटक: बिस्तर, काम करने की मेज, बाएँ और दाएँ कॉलम, काठी, मेढ़े, आदि, बड़े हिस्से राल रेत मोल्डिंग से बने होते हैं, उच्च गुणवत्ता वाले ग्रे आयरन 250 कास्टिंग, गर्म रेत के गड्ढे में एनील्ड → कंपन उम्र बढ़ने → गर्म फर्नेस एनीलिंग → कंपन एजिंग → रफ मशीनिंग → वाइब्रेशन एजिंग → फर्नेस एनीलिंग → वाइब्रेशन एजिंग → भागों के नकारात्मक तनाव को पूरी तरह से खत्म करने और भागों के प्रदर्शन को स्थिर रखने के लिए फिनिशिंग। उपकरण का कार्यक्षेत्र स्थिर है, और दोनों तरफ के पावर हेड आधार के आगे और पीछे की दिशाओं में घूम सकते हैं; मशीन में ड्रिलिंग, बोरिंग, काउंटरसिंकिंग, टैपिंग आदि जैसे कार्य हैं। उपकरण की शीतलन विधि आंतरिक शीतलन और बाहरी शीतलन है। मशीन में 5 फ़ीड अक्ष, 2 कटिंग पावर हेड होते हैं, जिन्हें एक ही समय में 5 अक्षों के साथ सिंक्रनाइज़ किया जा सकता है, या एकल-अभिनय किया जा सकता है। मशीन की अक्षीय दिशा और पावर हेड को नीचे दिए गए चित्र में दिखाया गया है।
2. 2 अक्षीय संचरण फ़ीड भाग की मुख्य संरचना
2.2.1 एक्स अक्ष: पावर हेड बेस की गाइड रेल के साथ पार्श्विक रूप से घूमता है।
एक्स1-अक्ष ड्राइव: एक्स-अक्ष की रैखिक गति का एहसास करने के लिए बॉल स्क्रू ड्राइव के माध्यम से पावर हेड को चलाने के लिए एसी सर्वो मोटर प्लस उच्च-सटीक ग्रहीय रेड्यूसर का उपयोग किया जाता है।
एक्स2-अक्ष ट्रांसमिशन: एक्स-अक्ष रैखिक गति का एहसास करने के लिए बॉल स्क्रू ट्रांसमिशन के माध्यम से पावर हेड को चलाने के लिए एसी सर्वो मोटर प्लस उच्च-सटीक ग्रहीय रेड्यूसर का उपयोग किया जाता है।
गाइड रेल फॉर्म: दो उच्च शक्ति वाली सटीक रैखिक गाइड रेल को चौड़े आधार पर टाइल किया गया है।
2.2 Y1 अक्ष: पावर हेड कॉलम पर ऊपर और नीचे घूमता है।
Y1-अक्ष ड्राइव: Y1-अक्ष की रैखिक गति का एहसास करने के लिए बॉल स्क्रू के माध्यम से ड्राइव करने के लिए एसी सर्वो मोटर को अपनाएं। गाइड रेल फॉर्म: 45 प्रकार के रैखिक गाइड रेल के 4 टुकड़े।
2.2.3 Y2 अक्ष: पावर हेड कॉलम पर ऊपर और नीचे घूमता है।
Y2-अक्ष ट्रांसमिशन: AC सर्वो मोटर का उपयोग Y1-अक्ष की रैखिक गति का एहसास करने के लिए बॉल स्क्रू के माध्यम से ड्राइव करने के लिए किया जाता है।
गाइड रेल फॉर्म: 45 प्रकार के रैखिक गाइड रेल के 4 टुकड़े।
2.2.4 Z1 अक्ष: पावर हेड काठी पर आगे और पीछे घूमता है।
Z1-अक्ष ट्रांसमिशन: Z1-अक्ष की रैखिक गति का एहसास करने के लिए बॉल स्क्रू के माध्यम से गति को चलाने के लिए एसी सर्वो मोटर और उच्च-सटीक ग्रहीय रेड्यूसर का उपयोग किया जाता है।
2.2.5 Z2 अक्ष: पावर हेड काठी पर आगे और पीछे घूमता है।
Z2-अक्ष ट्रांसमिशन: Z2-अक्ष रैखिक गति का एहसास करने के लिए बॉल स्क्रू के माध्यम से गति को चलाने के लिए एसी सर्वो मोटर और उच्च-सटीक ग्रहीय रेड्यूसर का उपयोग किया जाता है।
2.3. चिप हटाना और ठंडा करना
कार्यक्षेत्र के नीचे दोनों तरफ फ्लैट चेन चिप कन्वेयर स्थापित हैं, और सभ्य उत्पादन का एहसास करने के लिए लोहे के चिप्स को अंत में चिप कन्वेयर में छोड़ा जा सकता है। चिप कन्वेयर के शीतलक टैंक में एक शीतलन पंप होता है, जिसका उपयोग उपकरण के प्रदर्शन और सेवा जीवन को सुनिश्चित करने के लिए उपकरण के आंतरिक शीतलन + बाहरी शीतलन के लिए किया जा सकता है, और शीतलक को पुनर्नवीनीकरण किया जा सकता है।
3. पूर्ण डिजिटल संख्यात्मक नियंत्रण प्रणाली:
3.1. चिप ब्रेकिंग फ़ंक्शन के साथ, चिप ब्रेकिंग समय और चिप ब्रेकिंग चक्र को मैन-मशीन इंटरफ़ेस पर सेट किया जा सकता है।
3.2. टूल लिफ्टिंग फ़ंक्शन के साथ, टूल लिफ्टिंग दूरी को मैन-मशीन इंटरफ़ेस पर सेट किया जा सकता है। जब दूरी पूरी हो जाएगी, तो उपकरण को तेजी से उठाया जाएगा, और फिर चिप्स को फेंक दिया जाएगा, और फिर तेजी से ड्रिलिंग सतह पर आगे बढ़ाया जाएगा और स्वचालित रूप से काम में परिवर्तित कर दिया जाएगा।
3.2. केंद्रीकृत ऑपरेशन कंट्रोल बॉक्स और हैंडहेल्ड यूनिट संख्यात्मक नियंत्रण प्रणाली को अपनाते हैं और यूएसबी इंटरफेस और एलसीडी लिक्विड क्रिस्टल डिस्प्ले से लैस हैं। प्रोग्रामिंग, स्टोरेज, डिस्प्ले और संचार की सुविधा के लिए, ऑपरेशन इंटरफ़ेस में मैन-मशीन संवाद, त्रुटि क्षतिपूर्ति और स्वचालित अलार्म जैसे कार्य हैं।
3.2.. उपकरण में प्रसंस्करण से पहले छेद की स्थिति का पूर्वावलोकन और पुन: निरीक्षण करने का कार्य है, और ऑपरेशन बहुत सुविधाजनक है।
4. स्वचालित स्नेहन
मशीन परिशुद्धता रैखिक गाइड रेल जोड़े, सटीक बॉल स्क्रू जोड़े और अन्य उच्च परिशुद्धता गति जोड़े स्वचालित स्नेहन प्रणालियों से सुसज्जित हैं। स्वचालित चिकनाई पंप दबाव तेल का उत्पादन करता है, और मात्रात्मक स्नेहक तेल कक्ष तेल में प्रवेश करता है। जब तेल कक्ष तेल से भर जाता है और सिस्टम का दबाव 1.4 ~ 1.75 एमपीए तक बढ़ जाता है, तो सिस्टम में दबाव स्विच बंद हो जाता है, पंप बंद हो जाता है, और अनलोडिंग वाल्व भी उसी समय अनलोड हो जाता है। जब सड़क में तेल का दबाव 0.2 एमपीए से नीचे चला जाता है, तो मात्रात्मक स्नेहक चिकनाई बिंदु को भरना शुरू कर देता है और एक तेल भरने को पूरा करता है। मात्रात्मक ऑयलर द्वारा आपूर्ति की गई तेल की सटीक मात्रा और सिस्टम दबाव का पता लगाने की क्षमता के कारण, तेल की आपूर्ति विश्वसनीय है और यह सुनिश्चित करती है कि प्रत्येक गतिक जोड़ी की सतह पर एक तेल फिल्म है, जो घर्षण और घिसाव को कम करती है और क्षति को रोकती है। अति ताप के कारण आंतरिक संरचना में खराबी। , मशीन की सटीकता और जीवन सुनिश्चित करने के लिए।
5. मशीनपर्यावरण का उपयोग करें:
बिजली की आपूर्ति: तीन चरण AC380V±10%, 50Hz±1 परिवेश तापमान: -10°~ 45°
6. स्वीकृति मानदंड:
जेबी/टी10051-1999 "धातु काटने वाली मशीनों की हाइड्रोलिक प्रणाली के लिए सामान्य तकनीकी विशिष्टताएँ"
7. तकनीकी मापदंड:
| नमूना | 2050-5Z | |
| अधिकतम प्रसंस्करण वर्कपीस का आकार | लंबाई × चौड़ाई × ऊंचाई (मिमी) | 5000×2000×1500 |
| कार्य डेस्क का आकार | लंबाई X चौड़ाई (मिमी) | 5000*2000 |
| पावर हेड आधार दिशा यात्रा | आगे और पीछे ले जाएँ (मिमी) | 5000 |
| पावर हेड ऊपर और नीचे | रैम का ऊपर और नीचे स्ट्रोक (मिमी) | 1500 |
|
क्षैतिज रैम प्रकार ड्रिलिंग पावर हेड पावर हेड 1 2 | मात्रा (2 पीसी) | 2 |
| धुरी शंकु | BT50 | |
| ड्रिलिंग व्यास (मिमी) | Φ2-Φ60 | |
| टैपिंग व्यास (मिमी) | एम 3-M30 | |
| स्पिंडल गति (आर/मिनट) | 30~3000 | |
| सर्वो स्पिंडल मोटर पावर (किलोवाट) | 22*2 | |
| बाएँ और दाएँ यात्रा (मिमी) | 600 | |
| द्विदिशीय स्थिति निर्धारण सटीकता | 300मिमी*300मिमी | ±0.025 |
| द्वि-दिशात्मक दोहराव स्थिति सटीकता | 300मिमी*300मिमी | ±0.02 |





